
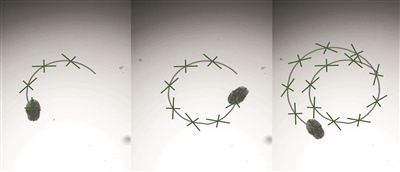
 生物杂化敏捷运动特性。图像来源:9月30日,北京的卡内基·梅隆大学工程科学技术学院(记者Zhang Jiaxin)卡内基·梅隆大学研究团队开发了一种新的工程方法。他们使用人类肺细胞生产微生物机器人。由这种纤毛驱动的机器人称为Aggrebots,随着它们对运动模式的控制改善了未来,他们有望在人体的复杂环境中执行特定的治疗或机械活动,例如递送药物。相关结果已发表在新的“科学进步”中。生物机器人是可以独立移动并编程并可以执行特定任务的人工生物机器的微观水平。过去,它们的MGA运动主要取决于肌肉纤维的收缩和舒张性。今天,研究小组采用了另一种自然机制,尤其是纤毛驱动器。纤毛是纳米尺度,例如结构,可以继续促进体内流体流动,并且在诸如肺部的器官中很重要。纤毛还可以帮助开发诸如Pragecium和Cun水母游泳之类的生物体。然而,长期以来,如何稳定纤毛驱动机器人影响的形状和运动已成为一个重大挑战。为了解决这个问题,研究团队开创了模块化组装方法。他们首先使用干细胞来培养小组织球,然后通过空间控制的集成插入它们,形成具有不同运动特征的凝集。同时,他们还在特定位置引入了具有基因突变的细胞球,以验证某些纤毛,从而实现了分布和纤毛计数的准确调节,从而控制了机器人运动模式。这是团队第一次有效地指导生物机器人运动的运动和调节CILI的运动一个。该团队说,这种方法为设计生物机器人和生物杂交机器人设计提供了新的视角。睫状和睫状单元的模块化组合创建具有特定运动模式的机器人。由于敏捷由生物材料和自然破坏和生物相容性组成,因此预计将直接在将来的医疗情况下使用。同时,该生物机器人还可以生产游戏机自己的细胞,以产生个性化的药物输送工具,以防止免疫下降。
生物杂化敏捷运动特性。图像来源:9月30日,北京的卡内基·梅隆大学工程科学技术学院(记者Zhang Jiaxin)卡内基·梅隆大学研究团队开发了一种新的工程方法。他们使用人类肺细胞生产微生物机器人。由这种纤毛驱动的机器人称为Aggrebots,随着它们对运动模式的控制改善了未来,他们有望在人体的复杂环境中执行特定的治疗或机械活动,例如递送药物。相关结果已发表在新的“科学进步”中。生物机器人是可以独立移动并编程并可以执行特定任务的人工生物机器的微观水平。过去,它们的MGA运动主要取决于肌肉纤维的收缩和舒张性。今天,研究小组采用了另一种自然机制,尤其是纤毛驱动器。纤毛是纳米尺度,例如结构,可以继续促进体内流体流动,并且在诸如肺部的器官中很重要。纤毛还可以帮助开发诸如Pragecium和Cun水母游泳之类的生物体。然而,长期以来,如何稳定纤毛驱动机器人影响的形状和运动已成为一个重大挑战。为了解决这个问题,研究团队开创了模块化组装方法。他们首先使用干细胞来培养小组织球,然后通过空间控制的集成插入它们,形成具有不同运动特征的凝集。同时,他们还在特定位置引入了具有基因突变的细胞球,以验证某些纤毛,从而实现了分布和纤毛计数的准确调节,从而控制了机器人运动模式。这是团队第一次有效地指导生物机器人运动的运动和调节CILI的运动一个。该团队说,这种方法为设计生物机器人和生物杂交机器人设计提供了新的视角。睫状和睫状单元的模块化组合创建具有特定运动模式的机器人。由于敏捷由生物材料和自然破坏和生物相容性组成,因此预计将直接在将来的医疗情况下使用。同时,该生物机器人还可以生产游戏机自己的细胞,以产生个性化的药物输送工具,以防止免疫下降。
